
目录
1. 什么是超像素
超像素(superpixel)是一种图像预分割方法。它会把一张图像中空间相邻、颜色或纹理相似的像素聚合成若干小区域。相比直接处理单个像素,超像素把图像从像素级表示转换为区域级表示。
一个理想的超像素结果通常具有以下特点:
- 区域内部尽量一致:同一个超像素内部应尽量属于同一物体、同一表面或同一语义类别。
- 区域边界尽量贴合真实图像边界:超像素边界应尽量覆盖物体边界、语义边界或显著外观边界。
- 区域数量适中:区域太少会过粗,容易跨越真实边界;区域太多会增加后续计算成本。
超像素的主要作用不是直接完成语义分割,而是为后续图像分析提供更稳定、更紧凑的中间表示。常见用途包括:
- 图像分割预处理。
- 区域级特征聚合。
- 目标边界分析。
- 图像标注传播。
- 区域图构建。
- 弱监督或交互式分割中的候选区域生成。
在这些场景中,超像素质量会影响后续算法的可靠性。如果一个超像素横跨真实语义边界,例如同时包含道路和车辆,那么后续对该区域提取的特征或标签都会被混合污染。相反,如果超像素能够较好地贴合真实边界,那么后续算法更容易在区域级别区分不同物体或不同语义类别。
因此,评价超像素算法时不能只看区域数量,也不能只看视觉效果,而应同时关注:
- 边界贴合度:真实语义边界是否被超像素边界覆盖。
- 区域纯度:单个超像素内部是否尽量不混合多个真实类别。
- 计算成本:每张图产生多少超像素区域。
2. 实验数据集与参与比较的算法
2.1 数据集
本次比较使用 Cityscapes 数据集的完整训练集:
- Dataset:Cityscapes
- Split:train
- Processed samples:2975 / 2975
- Failures:0
Cityscapes 是自动驾驶和街景理解中常用的数据集,包含道路、车辆、行人、建筑、交通设施等复杂城市街景。它适合用于测试超像素算法对真实语义边界的贴合能力,因为图像中存在大量细长物体、小目标、遮挡关系和复杂边界。
2.2 诊断范围
本次实验只比较超像素算法本身,评估内容包括:
- 超像素边界与 Cityscapes 真实语义边界的重合程度。
- 超像素区域内部的语义纯度。
- 每张图产生的超像素数量及区域大小分布。
- 样例图上的超像素边界可视化。
本次实验不评估任何下游任务,例如语义分割模型精度、区域合并效果或特征分类性能。因此,本文结论只说明这些算法在超像素层面的表现,不直接等价于下游任务的最终收益。
2.3 实验配置
本次实验的主要配置如下:
- comparison_name:
superpixel_full - split:
train - samples:2975 / 2975
- failures:0
- tolerance_px:2
- purity_threshold:0.95
其中:
- tolerance_px = 2:表示在评价边界重合时,允许超像素边界和真实语义边界之间存在 2 个像素以内的偏移。
- purity_threshold = 0.95:表示如果一个超像素区域中主类别像素占比低于 95%,该区域会被视为混合区域。
2.4 参与比较的算法
本次比较了 6 种超像素方法:
| 方法 ID | Backend | 说明 |
|---|---|---|
rust_slic_r24_c10 | rust_slic | Rust 实现的 SLIC,作为 baseline |
opencv_slic_r24_c10 | opencv_slic | OpenCV SLIC |
opencv_slico_r24 | opencv_slico | OpenCV SLICO |
opencv_mslic_r24_c10 | opencv_mslic | OpenCV MSLIC |
opencv_lsc_r24 | opencv_lsc | OpenCV LSC |
opencv_seeds_target_r24 | opencv_seeds | OpenCV SEEDS |
这些方法覆盖了常见的基于聚类、局部搜索或种子扩展的超像素算法。比较重点不是证明某个算法在所有场景中绝对最好,而是在 Cityscapes 街景图像上观察它们的边界贴合、区域纯度和成本差异。
3. 评价指标
本次比较使用以下指标:
| 指标 | 含义 | 趋势 |
|---|---|---|
recall_t | 在 tolerance_px=2 容差内,真实语义边界被超像素边界覆盖的比例 | 越高越好 |
precision_t | 超像素边界中有多少比例对齐真实语义边界 | 越高越好 |
f1_t | tolerant precision 与 tolerant recall 的调和平均 | 越高越好 |
missed_gt_boundary_rate_t | 未被超像素边界覆盖的真实语义边界比例,即 1 - recall | 越低越好 |
pixel_impurity | 被选中像素中不属于所在区域主类别的比例 | 越低越好 |
mixed_region_pixel_rate | 落在混合区域中的像素比例 | 越低越好 |
mean_num_regions | 每张图平均超像素区域数量 | 越低计算成本越低 |
这些指标可以分成三类:
- 边界覆盖指标:
recall_t、missed_gt_boundary_rate_t。 - 区域纯度指标:
pixel_impurity、mixed_region_pixel_rate。 - 成本指标:
mean_num_regions。
需要注意,所有方法的 precision_t 都较低。这是超像素任务中的常见现象:超像素算法通常会在图像内部产生大量区域边界,而这些边界并不一定对应真实语义边界。因此,precision 偏低并不必然说明算法失败,而是说明该方法产生了较多内部切分。
在本次分析中,更重要的是综合判断:
- 是否覆盖了足够多的真实语义边界。
- 是否减少了跨类别混合区域。
- 是否以可接受的区域数量完成这些目标。
4. 总体结果
4.1 边界贴合度
| 方法 | Recall@t | Missed boundary | Precision@t | F1@t |
|---|---|---|---|---|
rust_slic_r24_c10 | 76.10% | 23.90% | 8.09% | 14.63% |
opencv_slic_r24_c10 | 80.50% | 19.50% | 7.15% | 13.13% |
opencv_slico_r24 | 56.06% | 43.94% | 5.68% | 10.31% |
opencv_mslic_r24_c10 | 92.91% | 7.09% | 6.19% | 11.60% |
opencv_lsc_r24 | 68.84% | 31.16% | 7.78% | 13.98% |
opencv_seeds_target_r24 | 65.38% | 34.62% | 7.04% | 12.72% |
4.2 区域纯度与计算成本
| 方法 | Backend | 平均 region 数 | Pixel impurity | Mixed-region pixel rate |
|---|---|---|---|---|
rust_slic_r24_c10 | rust_slic | 4,513.5 | 2.59% | 10.66% |
opencv_slic_r24_c10 | opencv_slic | 3,824.0 | 2.78% | 11.41% |
opencv_slico_r24 | opencv_slico | 3,654.8 | 3.27% | 12.45% |
opencv_mslic_r24_c10 | opencv_mslic | 21,499.9 | 1.76% | 7.15% |
opencv_lsc_r24 | opencv_lsc | 3,608.2 | 2.96% | 11.63% |
opencv_seeds_target_r24 | opencv_seeds | 2,048.0 | 3.72% | 14.27% |
总体结果可以概括为:
- MSLIC 的边界覆盖率和区域纯度最强,但区域数量显著增加。
- Rust SLIC 的综合 F1 最好,区域数量适中,是最均衡的 baseline。
- OpenCV SLIC 在较低区域数量下提升了 boundary recall,但区域纯度略差。
- LSC、SEEDS、SLICO 在当前配置下没有表现出明显优势。
5. 具体算法比较
5.1 MSLIC:最高边界覆盖与最低污染,但成本最高
opencv_mslic_r24_c10 是本次比较中边界覆盖和区域纯度表现最强的方法:
- Recall@t:92.91%,最优。
- Missed GT boundary rate:7.09%,最优。
- Pixel impurity:1.76%,最优。
- Mixed-region pixel rate:7.15%,最优。
相对于 rust_slic_r24_c10:
- Boundary recall 提升:+16.72 percentage points。
- Missed boundary 降低:-16.81 percentage points。
- Pixel impurity 降低:-0.84 percentage points。
- Mixed-region pixel rate 降低:-3.51 percentage points。
样本级比较也显示 MSLIC 的优势非常稳定:
- 在 2974 / 2975 个样本上,MSLIC 的 boundary recall 高于 Rust SLIC。
- 在 2955 / 2975 个样本上,MSLIC 的 pixel impurity 低于 Rust SLIC。
这说明 MSLIC 的优势不是少数样本造成的,而是在完整 Cityscapes train split 上具有一致性。
但 MSLIC 的缺点同样明显:它产生的区域数量远高于其他方法。
- Rust SLIC 平均 region 数:4,513.5。
- MSLIC 平均 region 数:21,499.9。
- 相对 Rust SLIC 比例:约 4.63x。
- MSLIC region 数中位数:14,587。
- MSLIC region 数 P90:43,823。
- MSLIC region 数最大值:118,470。
因此,MSLIC 可以被视为高质量、高成本的方案。它适合用于追求边界覆盖和区域纯度的场景,但如果后续处理对区域数量敏感,则需要谨慎使用。
结论:MSLIC 是本次实验中边界贴合和区域纯度最强的方法,但其计算成本最高,不适合作为无条件默认选择。
5.2 Rust SLIC:最均衡的 baseline
rust_slic_r24_c10 虽然不是 recall 最高的方法,但它在整体折中上表现最好:
- F1@t:14.63%,六种方法中最高。
- Mean regions:4,513.5。
- Pixel impurity:2.59%,仅次于 MSLIC。
- Mixed-region pixel rate:10.66%,仅次于 MSLIC。
样本级 F1 胜出情况为:
rust_slic_r24_c10在 2333 / 2975 个样本上取得 F1 最优。
这说明 Rust SLIC 的优势在于平衡:它不会像 MSLIC 那样大幅增加区域数量,同时保持了较好的边界覆盖和区域纯度。
结论:Rust SLIC 是本次比较中最均衡的 baseline,适合需要兼顾质量和计算成本的场景。
5.3 OpenCV SLIC:低成本提高 boundary recall,但纯度略差
opencv_slic_r24_c10 的主要特点是区域数量比 Rust SLIC 更少,但 boundary recall 更高:
- Recall@t:80.50%,相比 Rust SLIC 的 76.10%,提升 +4.40 percentage points。
- Mean regions:3,824.0,相比 Rust SLIC 的 4,513.5,减少约 15%。
它的缺点是区域纯度略差:
- Pixel impurity:2.78%,高于 Rust SLIC 的 2.59%。
- Mixed-region pixel rate:11.41%,高于 Rust SLIC 的 10.66%。
- F1@t:13.13%,低于 Rust SLIC 的 14.63%。
样本级比较显示:
- Recall 高于 Rust SLIC:2609 / 2975 samples。
- F1 高于 Rust SLIC:232 / 2975 samples。
- Pixel impurity 低于 Rust SLIC:490 / 2975 samples。
结论:OpenCV SLIC 是一个有价值的低成本 recall 提升方案。它不一定比 Rust SLIC 更均衡,但适合测试较少区域数量下是否仍能提高语义边界覆盖。
5.4 LSC:当前配置下没有达到预期
opencv_lsc_r24 在当前 Cityscapes 设置下没有优于 Rust SLIC:
- LSC recall:68.84%,低于 Rust SLIC 的 76.10%,差值为 -7.26 percentage points。
- LSC F1:13.98%,低于 Rust SLIC 的 14.63%。
- LSC impurity:2.96%,高于 Rust SLIC 的 2.59%。
- LSC mixed rate:11.63%,高于 Rust SLIC 的 10.66%。
样本级比较也较弱:
- Recall 高于 Rust SLIC:3 / 2975 samples。
- F1 高于 Rust SLIC:355 / 2975 samples。
- Pixel impurity 低于 Rust SLIC:12 / 2975 samples。
结论:在当前 region_size=24 和默认 LSC ratio 配置下,LSC 不具备明显优势。
这不代表 LSC 在所有参数下都不可用,但当前配置不应作为优先选择。
5.5 SEEDS:当前配置过粗,漏边界较多
opencv_seeds_target_r24 的平均区域数量明显低于其他方法:
- Mean regions:2048.0。
这种较低区域数量带来了较低成本,但也导致边界覆盖不足:
- Recall@t:65.38%。
- Missed boundary rate:34.62%。
- Pixel impurity:3.72%。
- Mixed-region pixel rate:14.27%。
相对于 Rust SLIC:
- Recall 降低:-10.72 percentage points。
- Pixel impurity 增加:+1.13 percentage points。
- Mixed-region rate 增加:+3.61 percentage points。
- Region 数约为 Rust SLIC 的 0.45x。
结论:当前 SEEDS 配置过粗,容易漏掉真实语义边界。如果继续评估 SEEDS,应提高目标 region 数进行 sweep。
可以考虑的后续配置包括:
opencv_seeds_n3600opencv_seeds_n4500opencv_seeds_n6000
5.6 SLICO:当前表现最弱
opencv_slico_r24 是本次比较中表现最弱的方法:
- Recall@t:56.06%。
- Missed boundary rate:43.94%。
- F1@t:10.31%。
- Pixel impurity:3.27%。
- Mixed-region pixel rate:12.45%。
相对于 Rust SLIC,样本级比较几乎没有优势:
- Recall 高于 Rust SLIC:4 / 2975 samples。
- F1 高于 Rust SLIC:4 / 2975 samples。
- Pixel impurity 低于 Rust SLIC:4 / 2975 samples。
结论:SLICO 在当前配置下不适合作为优先候选。
6. 样本级稳定性分析
为了避免均值掩盖样本级差异,本次还统计了每张图上的最优方法。
6.1 Boundary recall winner
| 方法 | 胜出样本数 |
|---|---|
opencv_mslic_r24_c10 | 2972 |
opencv_slic_r24_c10 | 2 |
rust_slic_r24_c10 | 1 |
解释:MSLIC 在 boundary recall 上几乎完全支配其他方法。
6.2 Boundary F1 winner
| 方法 | 胜出样本数 |
|---|---|
rust_slic_r24_c10 | 2333 |
opencv_lsc_r24 | 338 |
opencv_slic_r24_c10 | 149 |
opencv_mslic_r24_c10 | 124 |
opencv_seeds_target_r24 | 31 |
opencv_slico_r24 | 0 |
解释:Rust SLIC 在 F1 上明显占优,说明它在边界覆盖和过度切分之间更均衡。
6.3 Pixel impurity winner
| 方法 | 胜出样本数 |
|---|---|
opencv_mslic_r24_c10 | 2949 |
rust_slic_r24_c10 | 19 |
opencv_slic_r24_c10 | 7 |
解释:MSLIC 在降低 mixed-label region contamination 上具有强一致性优势。
7. 可视化结果
7.1 可视化文件位置
为了让文章源码中不出现实验内部前缀,代表性可视化图已经复制到报告同目录下的 figures/ 文件夹。
每个方法包含两类图片:
- contact sheet:样例图上的超像素边界叠加可视化。
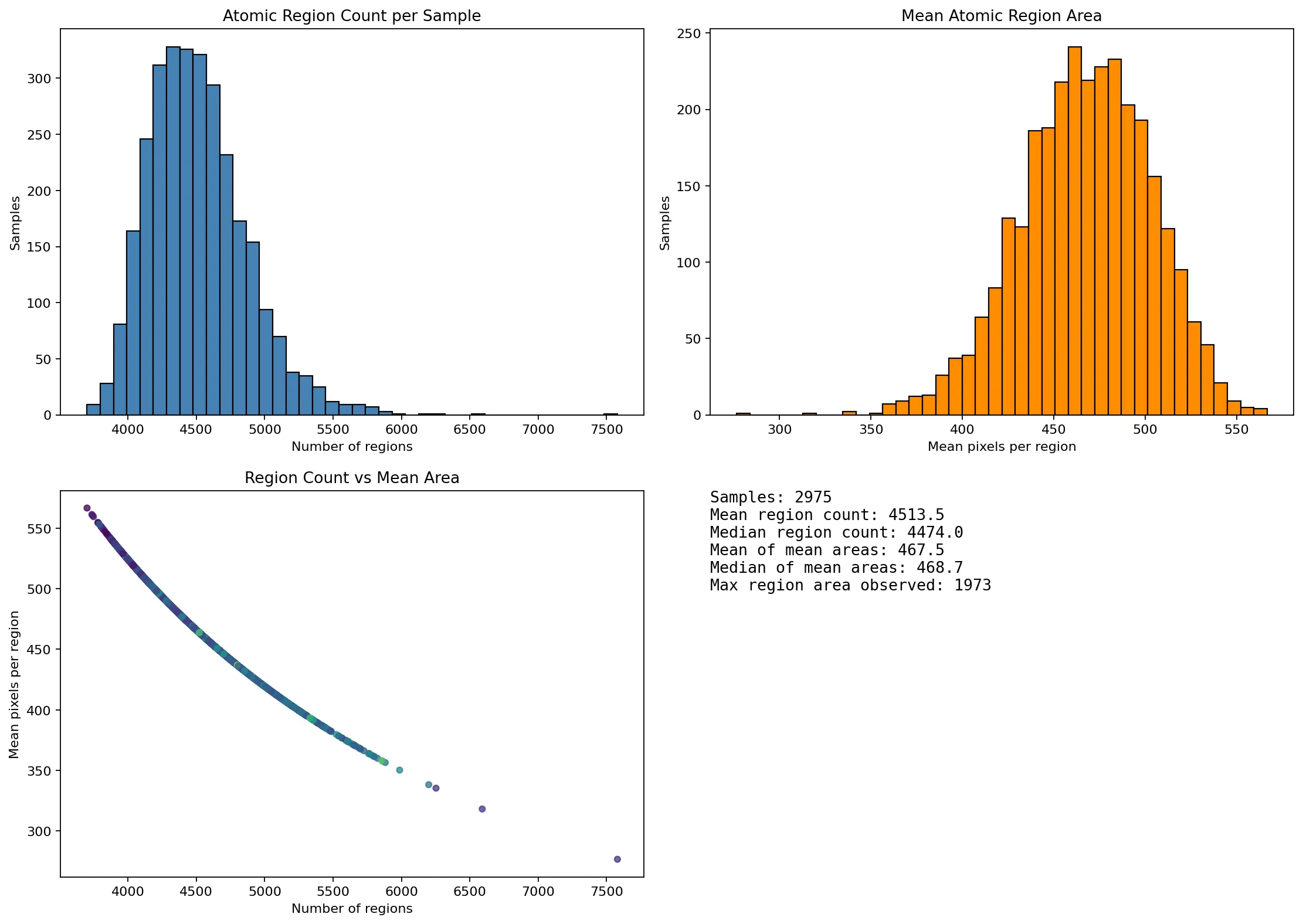
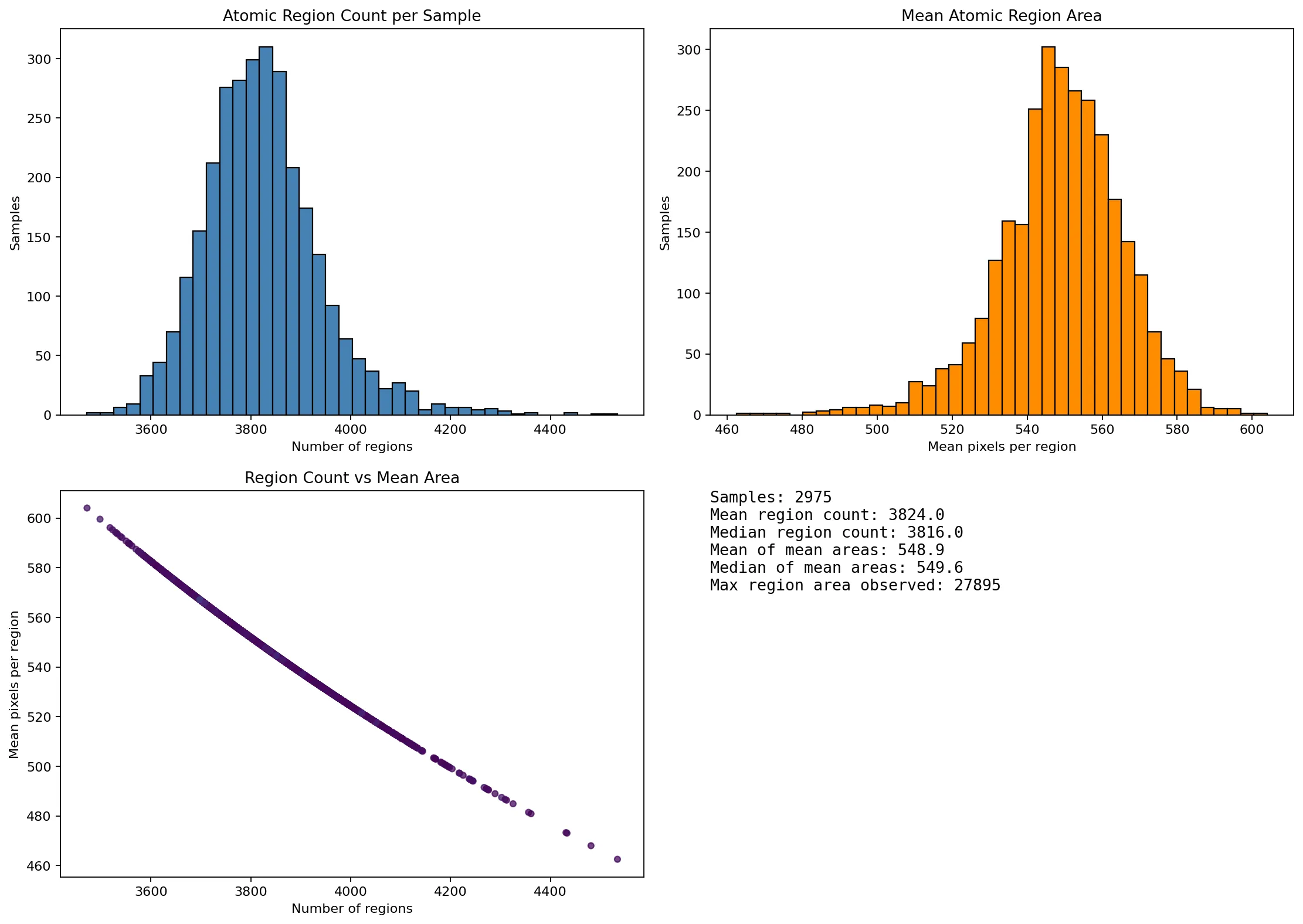
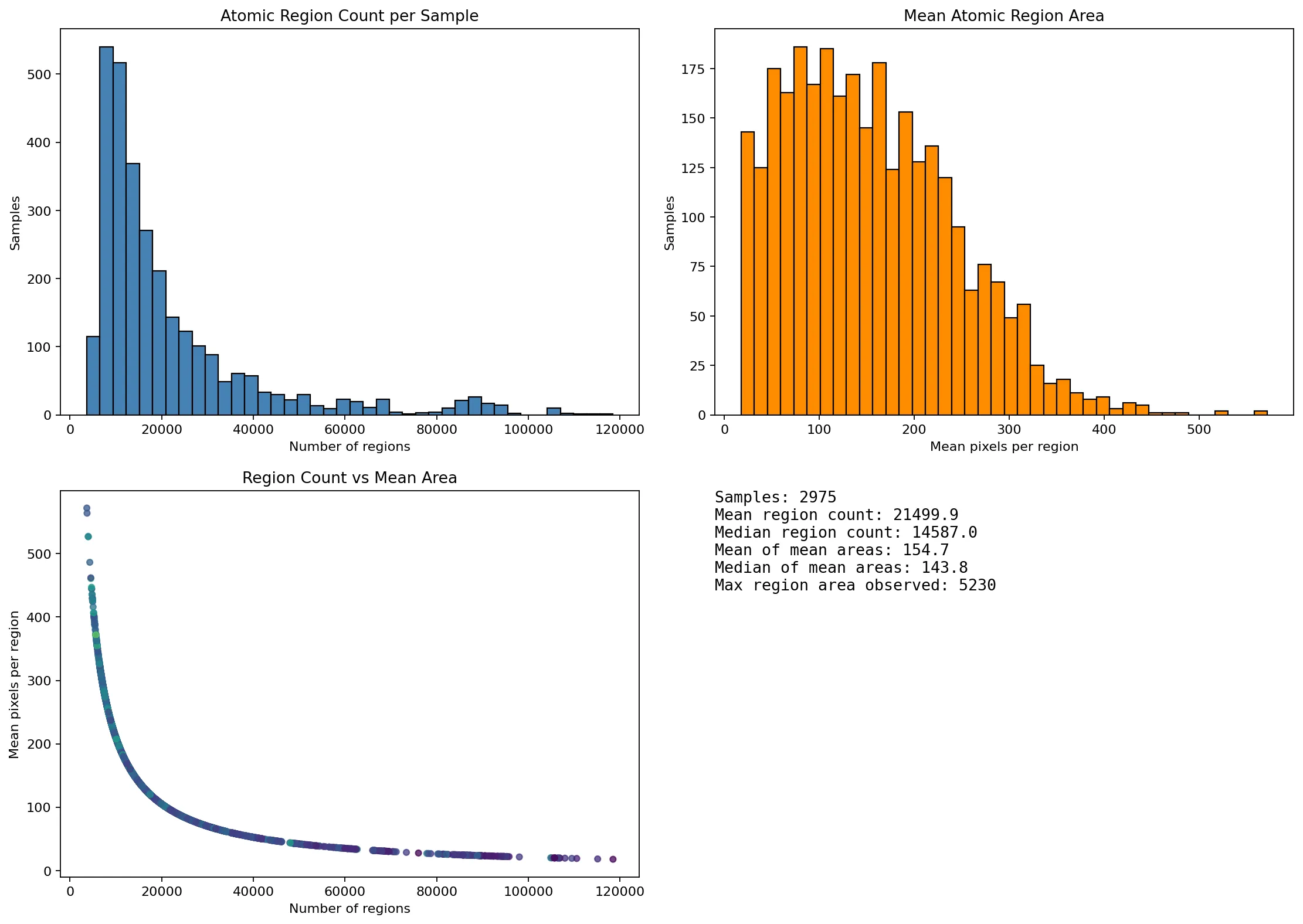
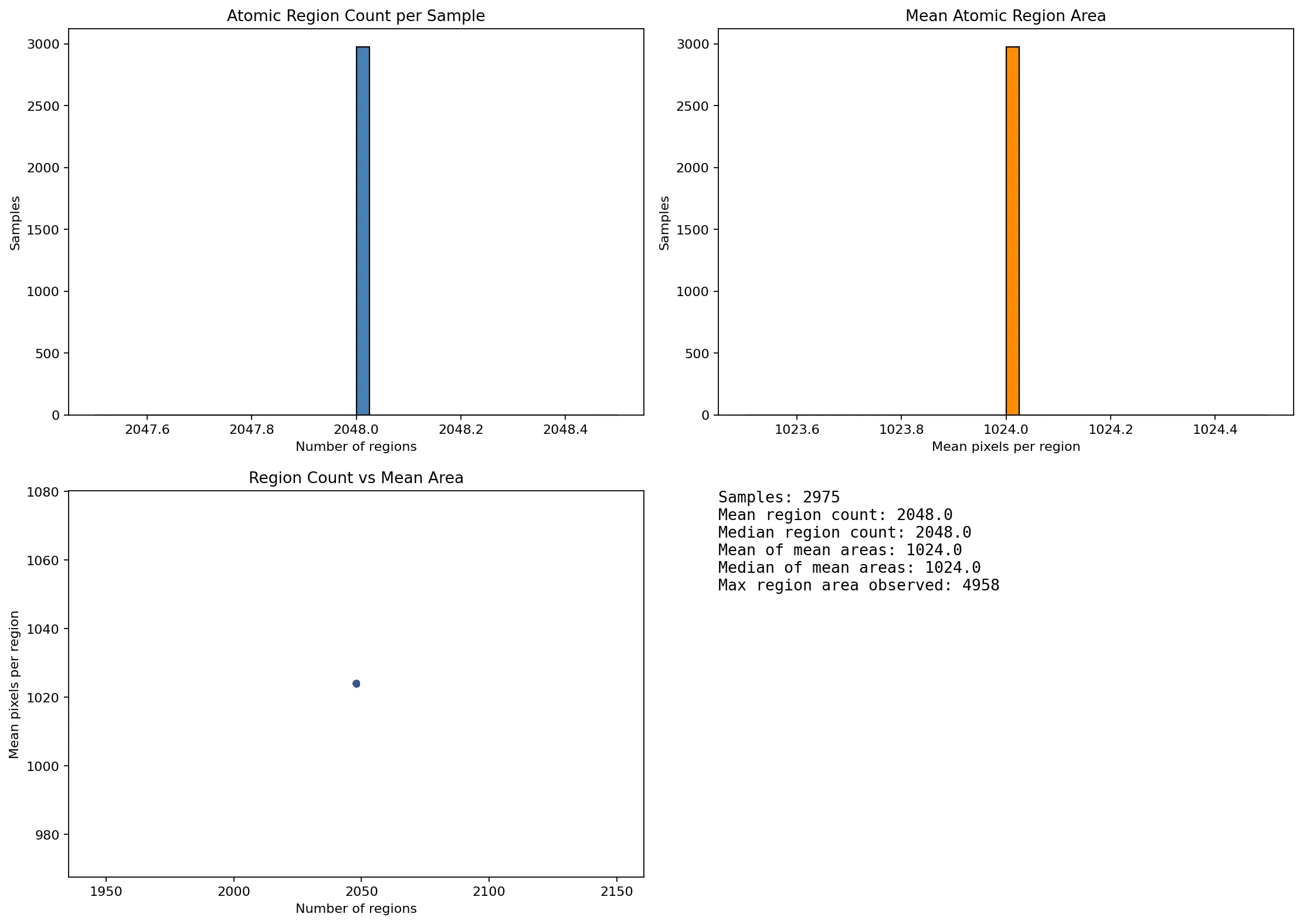
- region report:region 数量与平均 region 面积分布统计。
7.2 代表性图片引用
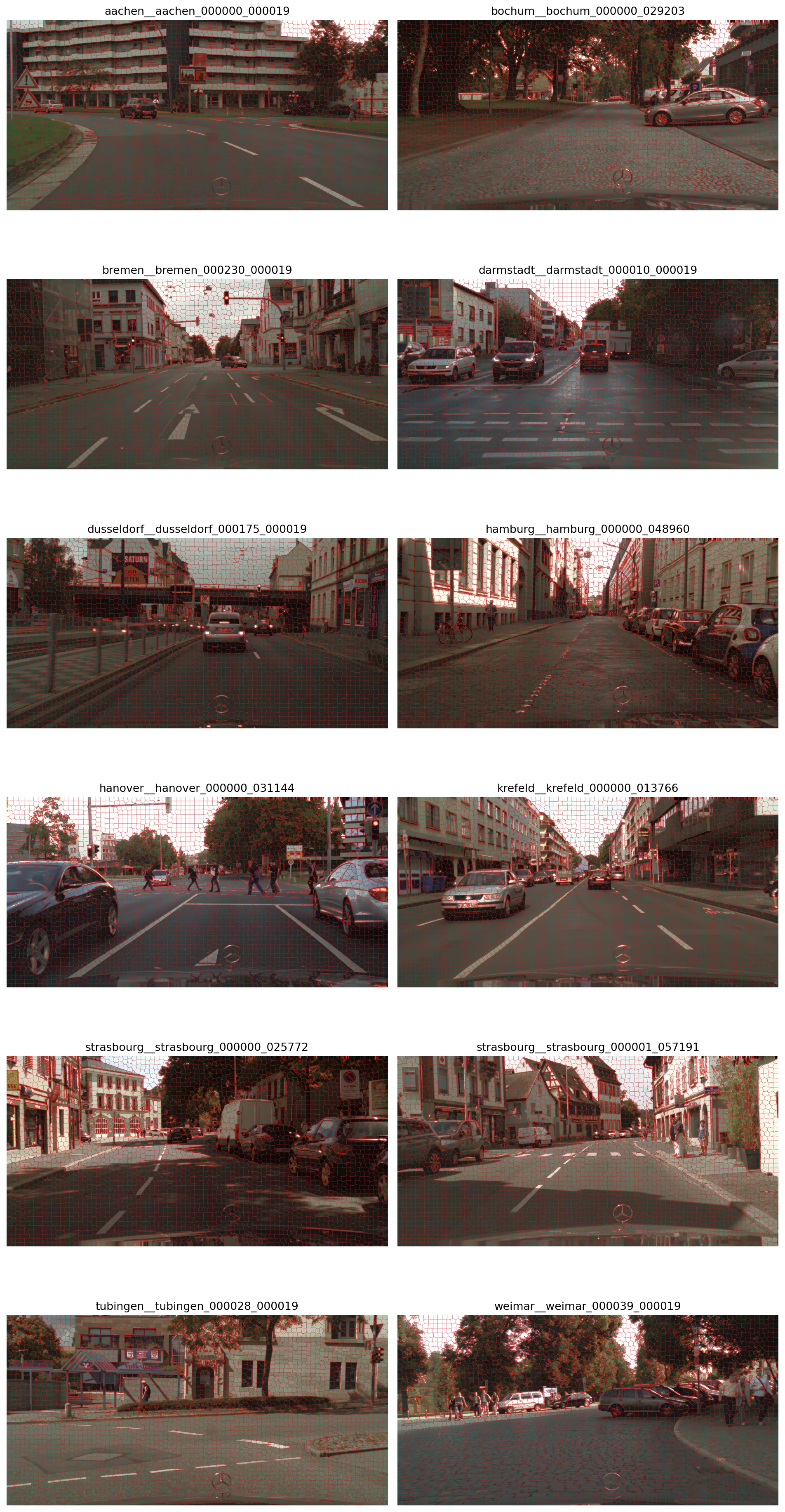
Rust SLIC baseline
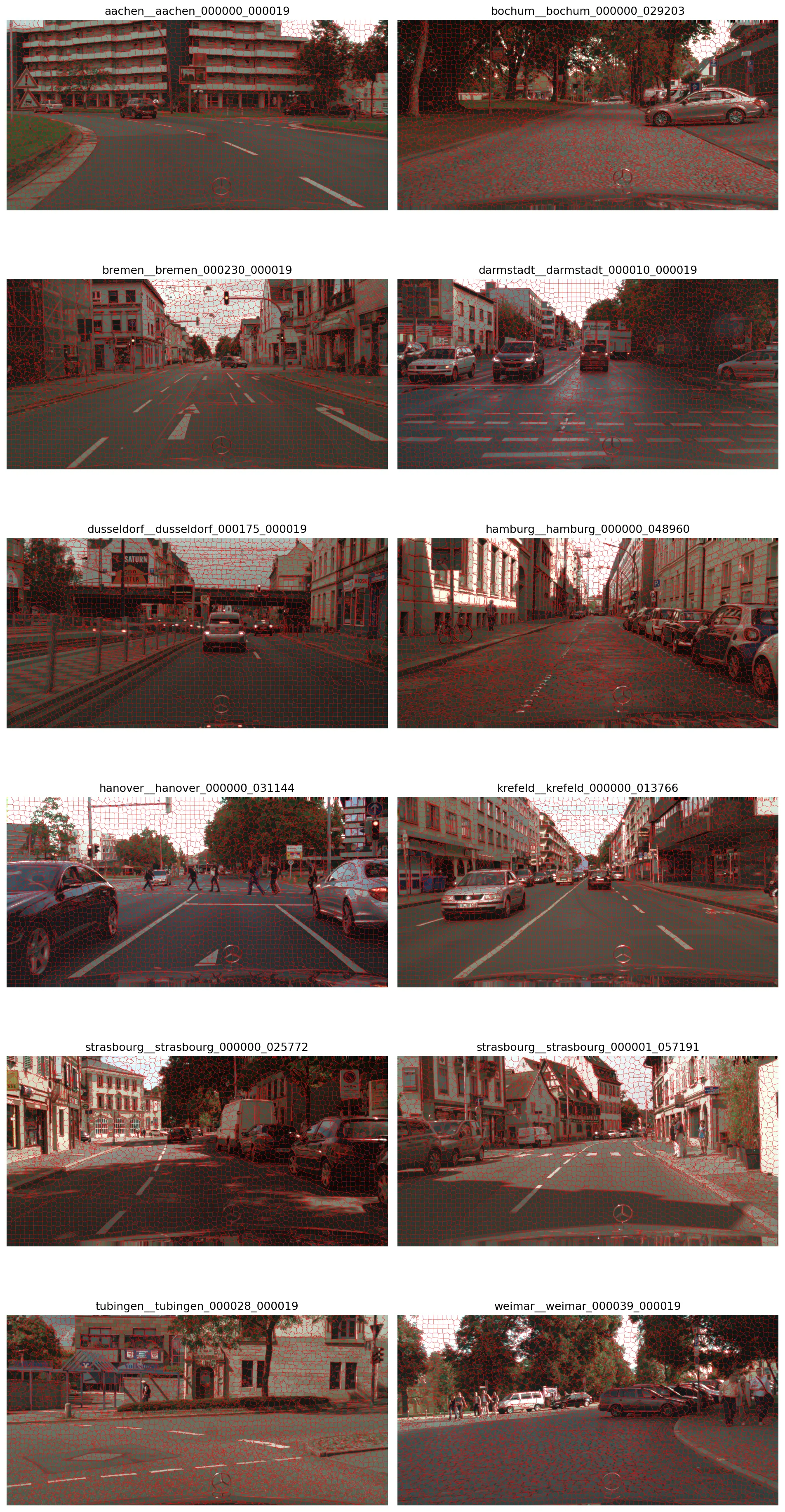
OpenCV SLIC
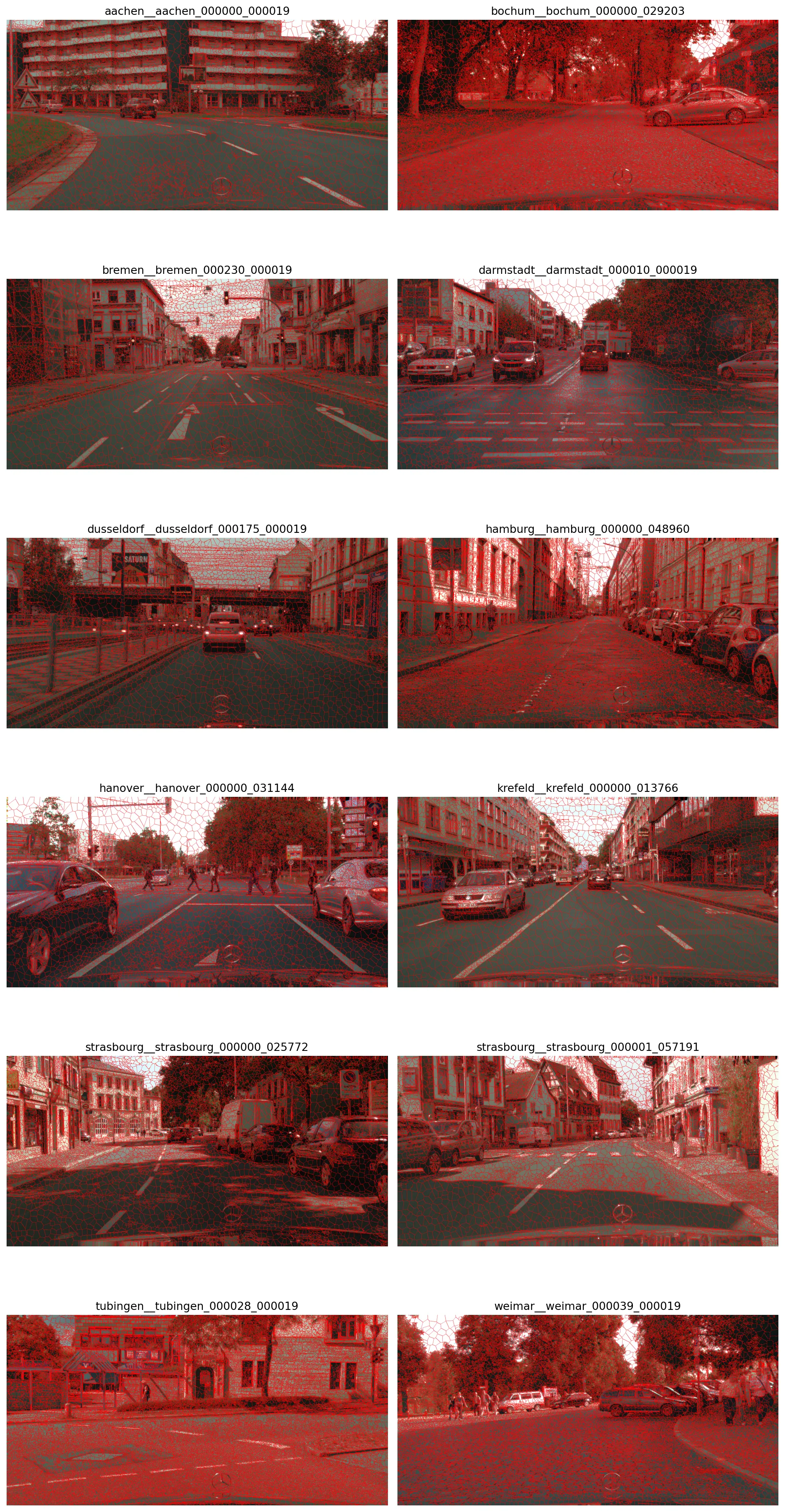
OpenCV MSLIC
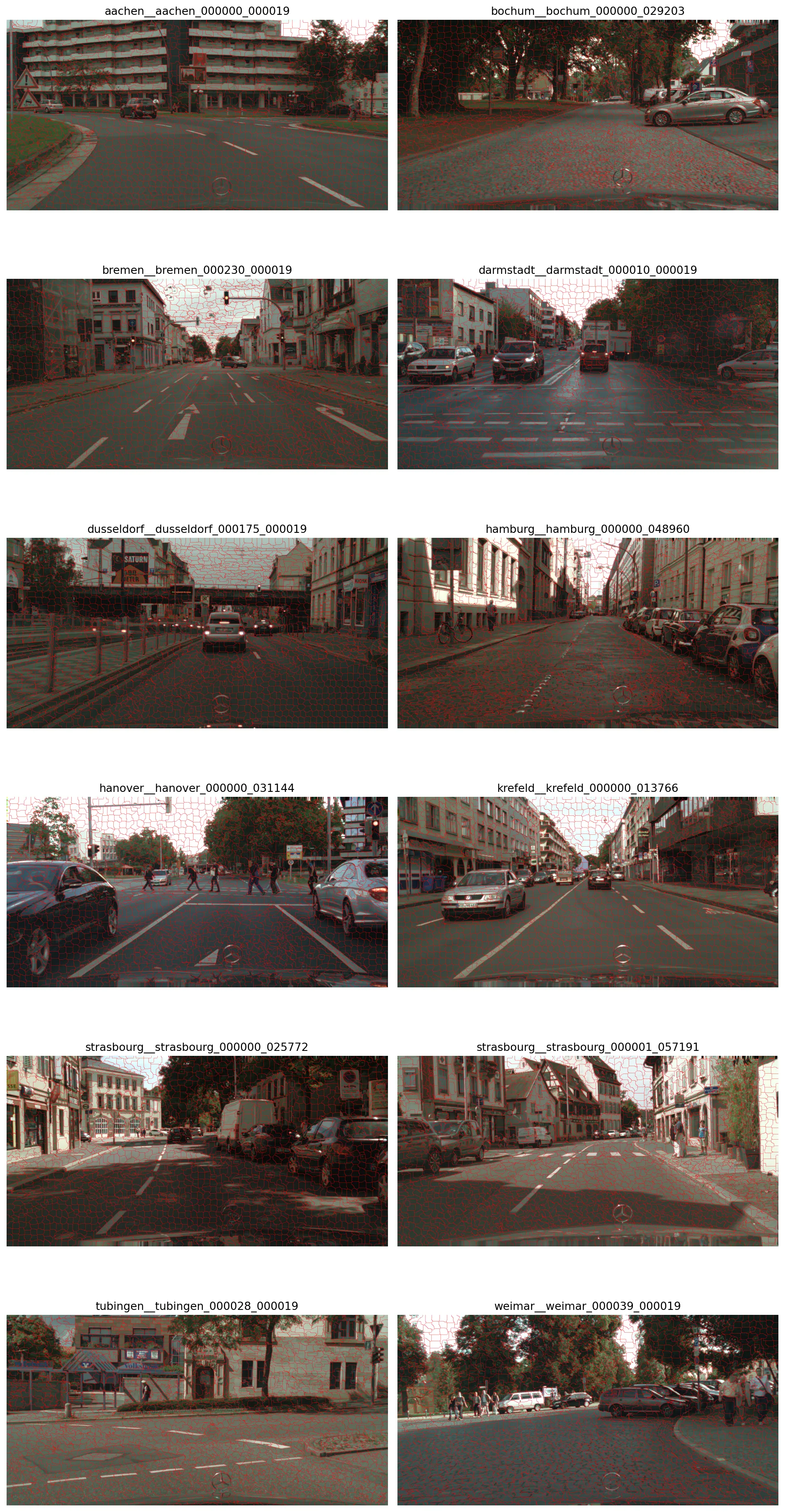
OpenCV SEEDS
7.3 可视化解读
从 contact sheet 可以看到,不同算法使用同一批 Cityscapes 样例图,因此可以直接比较边界密度和覆盖风格。
结合 train_report.png 和数值结果,可以得到以下观察:
- MSLIC 的边界最密集,对细小物体和复杂边界的覆盖更充分。 这与它 92.91% 的 boundary recall 和 1.76% 的 pixel impurity 一致。但它的 region 数分布长尾明显,最大 region 数达到 118,470。
- Rust SLIC 的边界密度适中,region 数集中在约 4.5k/image。 它没有 MSLIC 那样极高的边界覆盖率,但保持了较好的区域纯度和最优 F1。
- OpenCV SLIC 的 region 数低于 Rust SLIC,但 recall 更高。 它可以作为低成本提高边界覆盖的候选方法。
- SEEDS 当前配置明显更粗,平均 region 数只有 2048。 这与其较低 recall 和较高 impurity 一致,说明当前配置容易漏掉真实语义边界。
- LSC 和 SLICO 在当前参数下没有体现出优于 Rust SLIC 的视觉或统计优势。
可视化结果与指标结论一致:
- MSLIC 提供最高边界覆盖和最低污染,但代价是明显过度切分和计算成本。
- Rust SLIC 是更均衡的 baseline。
- OpenCV SLIC 是值得进一步验证的低成本候选。
- SEEDS、LSC、SLICO 当前配置不应优先推进。
8. 最终结论
本次 Cityscapes train split 上的超像素算法比较显示:
- MSLIC 是边界覆盖和区域纯度最强的方法。
- Rust SLIC 是质量与成本最均衡的 baseline。
- OpenCV SLIC 是有价值的低成本 recall 提升候选。
- LSC、SEEDS、SLICO 在当前配置下没有明显优势。
最关键的数值结果是:
- MSLIC 将 missed GT boundary rate 从 23.90% 降到 7.09%。
- MSLIC 将 pixel impurity 从 2.59% 降到 1.76%。
- MSLIC 将 mixed-region pixel rate 从 10.66% 降到 7.15%。
- MSLIC 将平均 region 数从约 4.5k 增加到约 21.5k / image。
因此,综合推荐为:
- 如果目标是最高边界覆盖和最低区域污染,优先考虑 MSLIC。
- 如果目标是质量与计算成本平衡,Rust SLIC 仍是更稳妥的选择。
- 如果目标是在较低成本下提升 boundary recall,OpenCV SLIC 值得继续评估。
- 当前配置下不建议优先使用 LSC、SLICO 或 SEEDS。
本报告的结论置信度为:
- 超像素层面结论:High。
- 跨数据集泛化结论:Medium,需要其他数据集验证。
- 下游任务收益推断:Medium,需要具体任务验证。